报告错误
如果你发现该网页中存在错误/显示异常,可以从以下两种方式向我们报告错误,我们会尽快修复:
- 使用 CS Club 网站错误 为主题,附上错误截图或描述及网址后发送邮件到 286988023@qq.com
- 在我们的网站代码仓库中创建一个 issue 并在 issue 中描述问题 点击链接前往Github仓库

材料
| 材料 | 数量 | |
|---|---|---|
| 1 | Arduino UNO 3 开发板 | 1 |
| 2 | 9G 舵机 | 1 |
| 3 | 超声波传感器 | 1 |
| 4 | 面包板 | 1 |
| 5 | 跳线 | 若干 |
原理
超声波测距仪
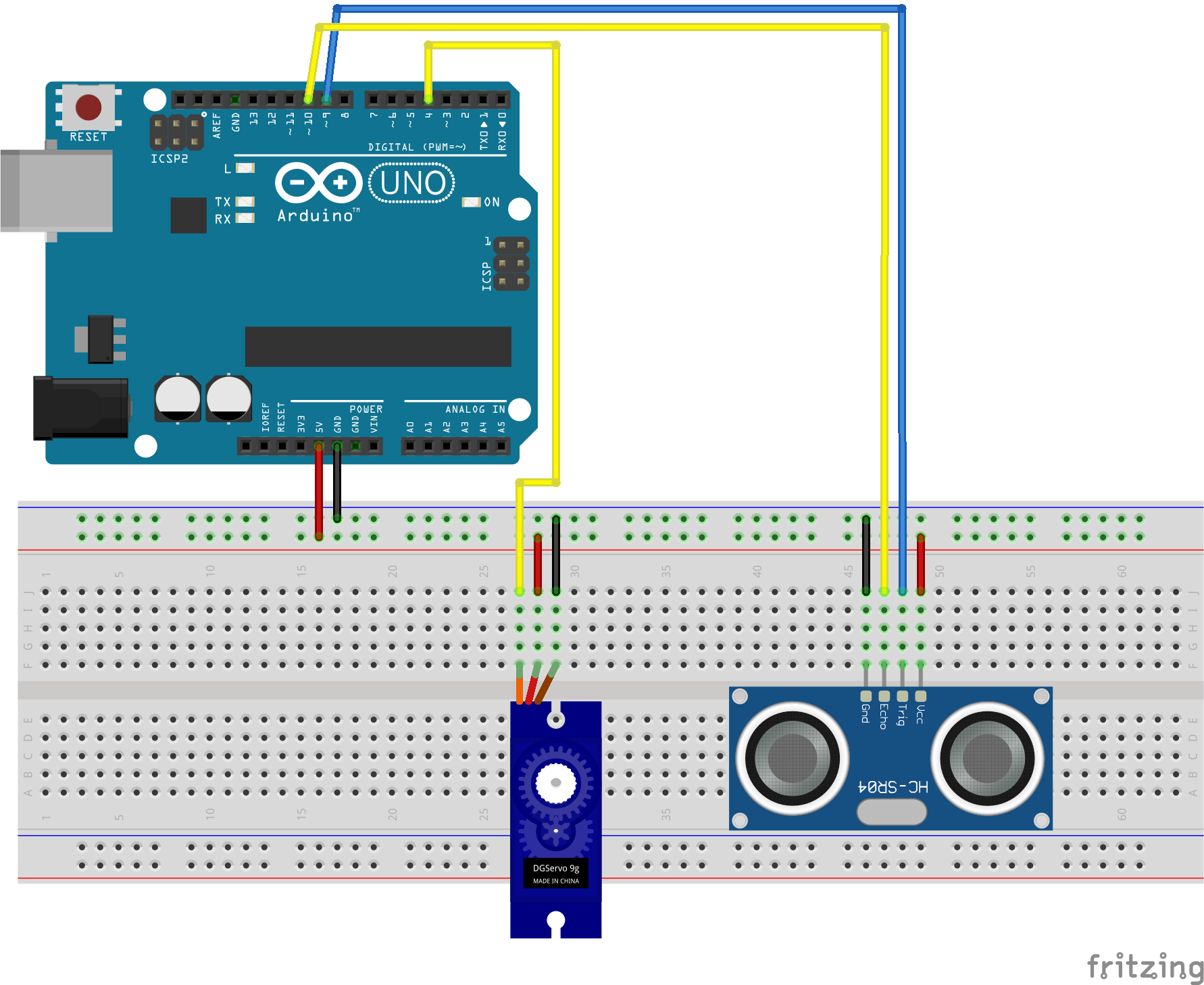
向超声波测距仪的 trig 脚发送高电平时,超声波测距仪发出超声波,当收到回波时,echo 脚会从低电平转化为高电平。通过测量向 trig 脚发送高电平和 echo 脚收到高电平之间的时间差,我们可以计算出障碍物与超声波测距仪之间的距离。
这里我们用了一个叫做 newping.h 的库,这个库在超声波测距的基础上添加了一些实用功能,例如“测三次距取中位数”等。
舵机
通过 Arduino 官方提供的 servo.h 库,我们可以精确的控制舵机旋转的角度。
串口通信
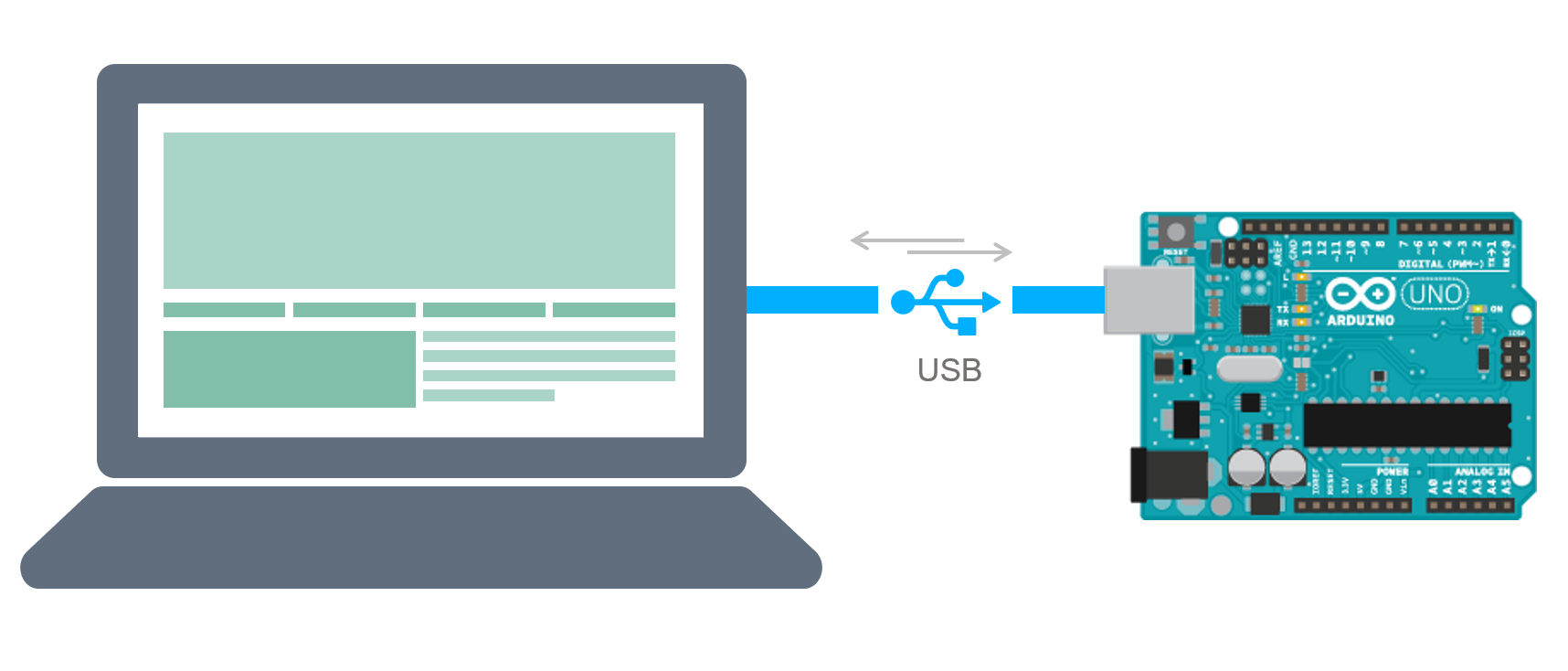
只要计算机与 Arduino 使用相同的速率发送 / 接收信号(相同的波特率),我们就可以用串口(USB线)在两个设备间进行通信。Python 通过 serial 库可以接收 Arduino 通过 Serial.print 输出的内容。
实现
官方文档链接
上传到 Arduino 中的代码 - Sonar.ino
(点击查看)
Sonar.ino
#include <NewPing.h>
#include <Servo.h>
int servo_port = 4;
int trig_port = 9;
int echo_port = 10;
const int STEP = 2;
const int SONIC_ITER = 3;
Servo servo;
NewPing sonar(trig_port, echo_port, MAX_DISTANCE);
void setup() {
Serial.begin(230400);
servo.attach(servo_port);
servo.write(0); // Initialize servo at 0 deg
pinMode(trig_port, OUTPUT);
pinMode(echo_port, INPUT);
}
void loop() {
for (int deg = 20; deg <= 160; deg += STEP) {
servo.write(deg);
float distance = get_distance(SONIC_ITER);
send_data(deg, distance, STEP);
}
for (int deg = 160; deg > 20; deg -= STEP) {
servo.write(deg);
float distance = get_distance(SONIC_ITER);
send_data(deg, distance, STEP);
}
}
void send_data(int degree, float distance, int STEP){
Serial.print(degree);
Serial.print(",");
Serial.print(distance);
Serial.print(",");
Serial.println(STEP);
}
float get_distance(int iter){
float distance = sonar.ping_median(iter) / 100;
return distance;
}
在电脑端 Python 运行的代码 - sonar_display.py
(点击查看)
sonar_display.py
import serial
import time
import matplotlib.pyplot as plt
import numpy as np
arduino = serial.Serial(port='COM3', baudrate=230400)
def read_arduino():
global arduino
try:
raw_data = arduino.readline().decode("ascii").strip().split(",")
degree, distance, step = map(float, raw_data)
return int(degree), int(distance), int(step)
except:
print("Failed to read from Arduino! Retrying ...")
time.sleep(0.1)
return 20, 0, 0
def draw_rader(ax1, all_points, degree, distance):
ax1.clear()
ax1.set_thetamax(170)
ax1.set_thetamin(10)
ax1.scatter(list(all_points.keys()), list(all_points.values()), c="green", s=8)
ax1.vlines([degree], 0, max(all_points.values()), color="red" if distance == 0 else "blue" )
plt.pause(0.00001)
if __name__ == "__main__":
fig = plt.figure()
fig.suptitle("Arduino Sonar")
ax1 = fig.add_subplot(projection="polar")
all_points = dict()
while True:
degree, distance, step = read_arduino()
degree, step = np.deg2rad(degree), np.deg2rad(step)
all_points[degree] = distance
draw_rader(ax1, all_points, degree, distance)
效果
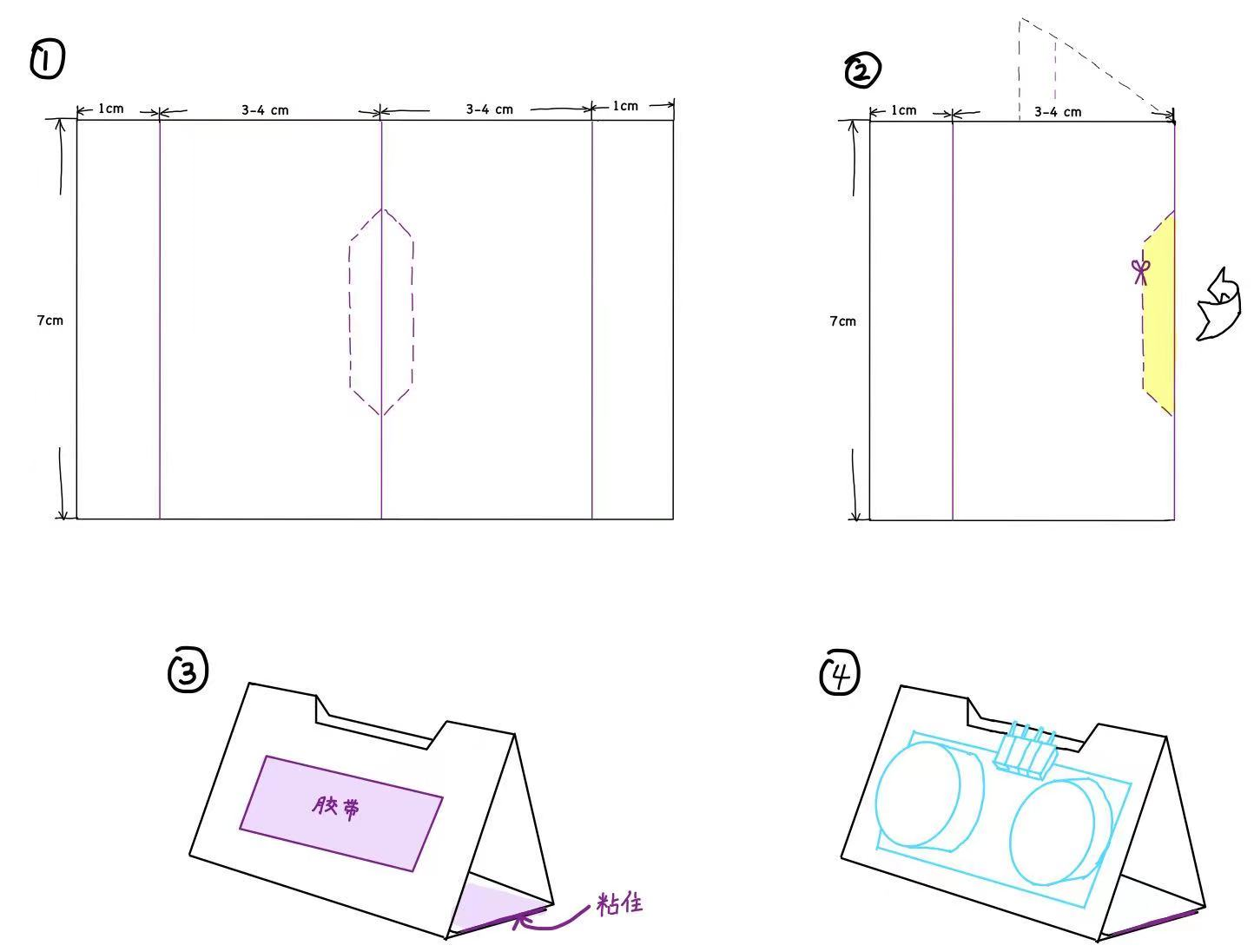
附:超声波测距仪支架简易制作方法
材料:硬卡纸一张